truemove fusion sensor
The truemove* fusion sensor is an “Attitude and Heading Reference System (AHRS)” – a device that measures the orientation and motion of an object in space, usually using a combination of accelerometers, gyroscopes and magnetometers.
AHRS can be used in a variety of applications, including virtual reality, immersive gaming, sports and fitness, and robotics – you probably know it from your Playstation or Wii.
In aircraft navigation, it’s used to provide information about an aircraft’s attitude and heading (roll, pitch, yaw). The same is true for skydivers.
For an arm-worn tracker, truemove* is the technology that enables you to interpret the acceleration data received from the sensors – because you need to know the position and orientation of the sensor itself to transform all measurement data into “world coordinates”.
If the tracker is attached to a fixed position (e.g. chest strap, mudflap), it can provide detailed information about the orientation (attitude) of the jumper. These can be correlated along with the other tracking parameters (speed, descent rate, etc) and provide information about the effects of in-flight position changes.
No device has been able to do this so far!
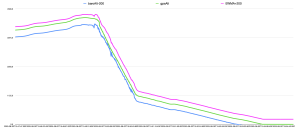
With airlogOne, the attitude data is stored as “quaternion”, a mathematical form that has significant advantages for further processing. It can be easily converted to the classic format of roll, pitch and yaw angles.