Background knowledge, Features, Software Release
Barometers, redefined
Aug
As already described in an earlier blog article, barometric altimeters are not always as accurate as you would like them to be. Especially during very dynamic maneuvers in freefall or on small parachutes, they often reach their physical limits – not because they are inaccurate per se, but because the altitude computation from the air pressure requires a static pressure…
We would like to delve a little deeper into the challenges of a correct altitude display and also report on our considerations and design decisions.
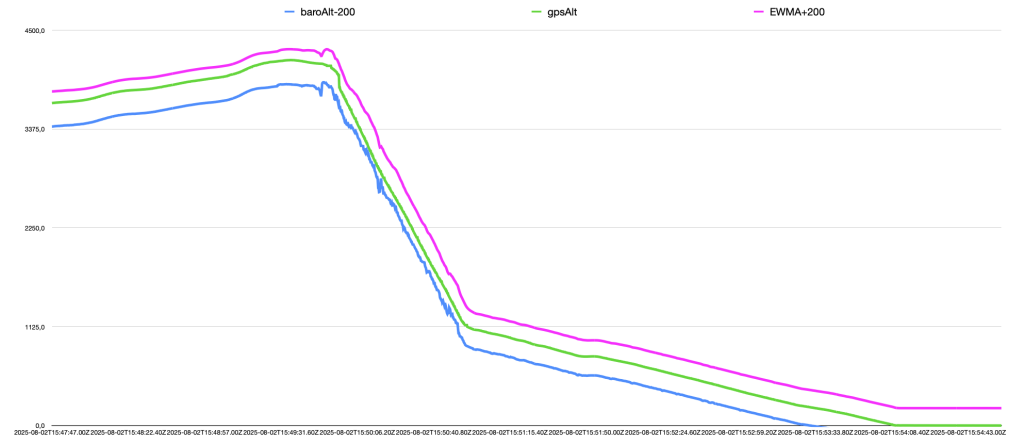
The graph above shows the measurement data of a freefall jump with one of our current devices equipped with the latest barometric sensor technology. The aim was to assess this sensor correctly and find a suitable filter setting. Throughout the jump we had excellent GPS reception with >20 satellites at all times, so the recorded GPS altitude can be used as an absolute reference of sufficient accuracy. The altitude data from the GPS receiver was corrected for the elevation of the location so that 0m is displayed after landing.
The three graphs show the altitude progression during approach, freefall, gliding and landing. The *GPS data* (green) is displayed as the correct altitude, *BaroData* (blue) is just minimally filtered and shifted downwards by 200m, *BaroData EWMA* (magenta) is filtered and shifted upwards by 200m. The altitude offset is only for display purposes in order to be able to compare the curves easily (the real measured values are therefore close together).
What is noticeable: In the airplane, during the climb, the baro data show a 60-70m lower altitude. This is typical and is due to the flow conditions inside the aircraft (here: Cessna Caravan), this deviation is certainly different in other aircraft.
After the exit, there are clearly visible fluctuations in the barometric altitude in freefall, which result from the dynamic movements of the jumper or the arm on which the measuring device is located.
Every rotation, change of position, etc. changes the flow and thus the pressure situation.
Ask the AAD manufacturer you trust how difficult it is to make a safe deployment decision based on a barometric measurement when a jumper is in distress.
Every altimeter tries to hide these dynamic deviations by suitable filtering. However, filtering takes time (as older measured values are included to a certain extent into the calculation of the new measured value) – and the display thus lags somewhat behind the real altitude.
Why this is important: Skydivers who fly dramatic maneuvers with sub-100 canopies and then use the altitude reading on their barometric altimeter to make far-reaching decisions for their maneuvers should be aware that the altimeter may not be perfectly accurate after such a maneuver…
We show our filtering of the barometric reading with the magenta line. The signal is significantly smoothed, but still closely follows the pressure movements. Goal: We want the most current altitude, but without disturbances.
What is done to achieve this: “Oversampling” and averaging (*oversampling*: For example, five measurements per second are to be recorded. However, 50 measurements are taken per second so that 10 measurements can be averaged). In this way, we can ensure that the measured value displayed is always as up-to-date as possible.
But that’s not all:
with our software version 3.2, we are introducing
fusionAltitude
for the first time.
With fusionAltitude, we adaptively merge the barometric altitude with the GPS altitude (adjusted for the elevation of the location). This is done dynamically, depending on the quality of the GPS signal: no GPS – only baro, medium GPS signal: baro dominates; good to very good GPS signal: GPS dominates.